返回
 优秀
优秀
AR导航应用 v2.0
个人项目 v1.0.0
项目简介
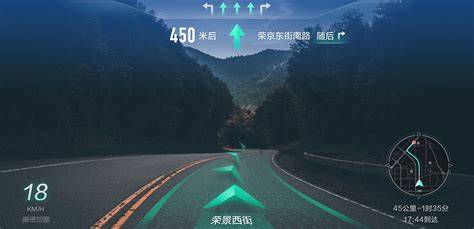
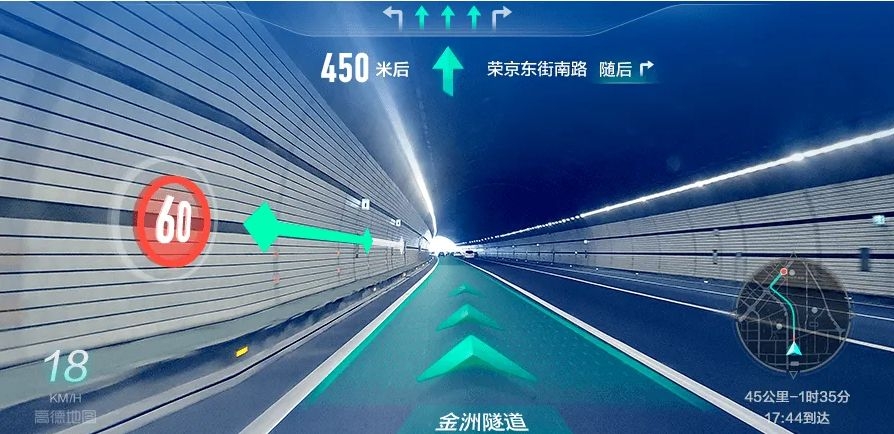
AR导航通过**“实景+虚拟融合”**,结合高精度定位、实时三维渲染和智能路径规划,实现室内外无缝衔接的沉浸式导航体验,解决了传统导航在复杂场景中定位断层、空间认知成本高和模式切换不连贯等问题。
核心技术架构
高精度融合定位引擎:室外采用GPS差分技术与抗遮挡算法,精度可达2-5米;室内通过蓝牙Beacon三边定位与动态RSSI信号库,实现1-3米精度,并利用空间围栏技术在0.5秒内自动切换室内外模式。
实时三维渲染引擎:融合摄像头流、定位坐标与路径规划结果,WebGL毫秒级叠加虚拟路线,IMU传感器校准抗抖动,延迟控制在20ms以内,支持AR实景与3D地图双模式切换。
智能路径规划引擎:结合Dijkstra与AI算法,综合步行距离、电梯优先级、实时人流等权重,动态计算最优路径,实测可提升40%路径效率。
核心技术架构
高精度融合定位引擎:室外采用GPS差分技术与抗遮挡算法,精度可达2-5米;室内通过蓝牙Beacon三边定位与动态RSSI信号库,实现1-3米精度,并利用空间围栏技术在0.5秒内自动切换室内外模式。
实时三维渲染引擎:融合摄像头流、定位坐标与路径规划结果,WebGL毫秒级叠加虚拟路线,IMU传感器校准抗抖动,延迟控制在20ms以内,支持AR实景与3D地图双模式切换。
智能路径规划引擎:结合Dijkstra与AI算法,综合步行距离、电梯优先级、实时人流等权重,动态计算最优路径,实测可提升40%路径效率。
技术栈
提交于 2026-01-23 14:06